Բաժանորդագրվեք մեր սոցիալական ցանցերին՝ արագ հրապարակումներ կատարելու համար
Օղակաձև լազերային գիրոսկոպները (ՕԼԳ) իրենց ստեղծումից ի վեր զգալիորեն զարգացել են՝ կարևոր դեր խաղալով ժամանակակից նավիգացիոն և տրանսպորտային համակարգերում: Այս հոդվածը խորանում է ՕԼԳ-ների մշակման, սկզբունքի և կիրառությունների մեջ՝ ընդգծելով դրանց կարևորությունը իներցիոն նավիգացիոն համակարգերում և դրանց օգտագործումը տարբեր տրանսպորտային մեխանիզմներում:
Գիրոսկոպների պատմական ճանապարհորդությունը
Հայեցակարգից մինչև ժամանակակից նավիգացիա
Գիրոսկոպների ճանապարհորդությունը սկսվեց 1908 թվականին առաջին գիրոկոմպասի համատեղ գյուտով՝ Էլմեր Սփերիի, ով անվանվել է «ժամանակակից նավիգացիոն տեխնոլոգիաների հայր», և Հերման Անշուտց-Կեմպֆեի կողմից։ Տարիների ընթացքում գիրոսկոպները զգալի բարելավումներ են ապրել՝ մեծացնելով դրանց օգտակարությունը նավիգացիայի և տրանսպորտի մեջ։ Այս առաջընթացները հնարավորություն են տվել գիրոսկոպներին ապահովել կարևոր ուղղորդում ինքնաթիռների թռիչքների կայունացման և ավտոպիլոտի շահագործման հնարավորությունների համար։ Լոուրենս Սփերիի կողմից 1914 թվականի հունիսին անցկացված նշանակալի ցուցադրությունը ցուցադրեց գիրոսկոպիկ ավտոպիլոտի ներուժը՝ կայունացնելով ինքնաթիռը, երբ նա կանգնած էր օդաչուի խցիկում, ինչը նշանակալի առաջընթաց էր ավտոպիլոտի տեխնոլոգիայի ոլորտում։
Անցում օղակաձև լազերային գիրոսկոպների
Էվոլյուցիան շարունակվեց 1963 թվականին Մաչեկի և Դեյվիսի կողմից առաջին օղակաձև լազերային գիրոսկոպի գյուտով։ Այս նորարարությունը նշանավորեց անցում մեխանիկական գիրոսկոպներից լազերային գիրոսկոպների, որոնք առաջարկում էին ավելի բարձր ճշգրտություն, ավելի ցածր սպասարկում և կրճատված ծախսեր։ Այսօր օղակաձև լազերային գիրոսկոպները, հատկապես ռազմական կիրառություններում, գերիշխում են շուկայում՝ իրենց հուսալիության և արդյունավետության շնորհիվ այն միջավայրերում, որտեղ GPS ազդանշանները վտանգված են։
Օղակաձև լազերային գիրոսկոպների սկզբունքը
Սագնակի էֆեկտի հասկացումը
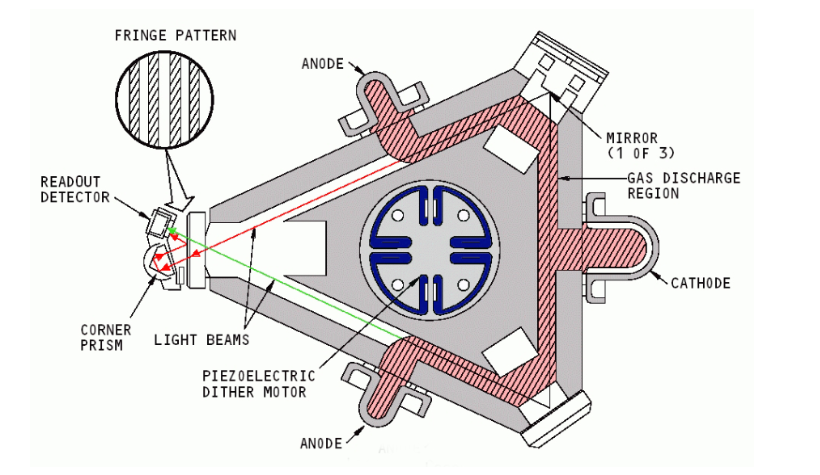
ՌԼԳ-ների հիմնական ֆունկցիոնալությունը կայանում է իներցիոն տարածությունում օբյեկտի կողմնորոշումը որոշելու նրանց ունակության մեջ: Սա իրականացվում է Սանյակի էֆեկտի միջոցով, որտեղ օղակաձև ինտերֆերոմետրը օգտագործում է փակ հետագծի շուրջ հակառակ ուղղություններով շարժվող լազերային ճառագայթներ: Այս ճառագայթների կողմից ստեղծված ինտերֆերենցիալ պատկերը գործում է որպես ստացիոնար հենակետ: Ցանկացած շարժում փոխում է այս ճառագայթների հետագծի երկարությունները՝ առաջացնելով ինտերֆերենցիալ պատկերի փոփոխություն անկյունային արագությանը համամասնական: Այս հնարամիտ մեթոդը թույլ է տալիս ՌԼԳ-ներին չափել կողմնորոշումը բացառիկ ճշգրտությամբ՝ առանց արտաքին հղումների վրա հույս դնելու:
Կիրառություններ նավարկության և տրանսպորտի մեջ
Հեղափոխություն իներցիոն նավիգացիոն համակարգերի (INS) մեջ
Իներցիոն նավիգացիոն համակարգերի (ԻՆՀ) մշակման գործում կարևոր դեր են խաղում RLG-ները, որոնք կարևոր են GPS-ից զուրկ միջավայրերում նավերի, ինքնաթիռների և հրթիռների ուղղորդման համար: Դրանց կոմպակտ, շփման հնարավորություն չունեցող դիզայնը դրանք դարձնում է իդեալական նման կիրառությունների համար՝ նպաստելով ավելի հուսալի և ճշգրիտ նավիգացիոն լուծումների ստեղծմանը:
Կայունացված հարթակ ընդդեմ ամրացվող INS-ի
INS տեխնոլոգիաները զարգացել են՝ ներառելով ինչպես կայունացված հարթակ, այնպես էլ ամրակապման համակարգեր: Կայունացված հարթակով INS-ները, չնայած իրենց մեխանիկական բարդությանը և մաշվածության նկատմամբ զգայունությանը, ապահովում են կայուն աշխատանք՝ անալոգային տվյալների ինտեգրման միջոցով:Մյուս կողմից, ամրացվող INS համակարգերը օգտվում են RLG-ների կոմպակտ և սպասարկում չպահանջող բնույթից, ինչը դրանք դարձնում է ժամանակակից ինքնաթիռների համար նախընտրելի ընտրություն՝ իրենց ծախսարդյունավետության և ճշգրտության շնորհիվ։
Հրթիռային նավիգացիայի բարելավում
RLG-ները նաև կարևոր դեր են խաղում խելացի զինամթերքի ուղղորդման համակարգերում: Այն միջավայրերում, որտեղ GPS-ը անվստահելի է, RLG-ները ապահովում են նավիգացիայի հուսալի այլընտրանք: Դրանց փոքր չափսը և ծայրահեղ ուժերի նկատմամբ դիմադրությունը դրանք դարձնում են հարմար հրթիռների և հրետանային արկերի համար, որոնց օրինակներն են Tomahawk թևավոր հրթիռը և M982 Excalibur-ը:

Հենարաններով կիմբալային իներցիոն կայունացված հարթակի օրինակելի դիագրամ: Engineering 360-ի շնորհիվ:
Հրաժարում պատասխանատվությունից՝
- Մենք հայտարարում ենք, որ մեր կայքում ներկայացված որոշ պատկերներ հավաքված են ինտերնետից և Վիքիպեդիայից՝ կրթության և տեղեկատվության փոխանակման խթանման նպատակով: Մենք հարգում ենք բոլոր ստեղծողների մտավոր սեփականության իրավունքները: Այս պատկերների օգտագործումը նախատեսված չէ առևտրային շահույթի համար:
- Եթե կարծում եք, որ օգտագործված որևէ բովանդակություն խախտում է ձեր հեղինակային իրավունքը, խնդրում ենք կապվել մեզ հետ: Մենք պատրաստ ենք ձեռնարկել համապատասխան միջոցներ, ներառյալ պատկերների հեռացումը կամ պատշաճ կերպով հղում կատարելը՝ մտավոր սեփականության օրենքներին և կանոնակարգերին համապատասխանությունն ապահովելու համար: Մեր նպատակն է պահպանել բովանդակությամբ հարուստ, արդար և ուրիշների մտավոր սեփականության իրավունքները հարգող հարթակ:
- Խնդրում ենք կապվել մեզ հետ հետևյալ էլեկտրոնային հասցեով՝sales@lumispot.cnՄենք պարտավորվում ենք անհապաղ միջոցներ ձեռնարկել ցանկացած ծանուցում ստանալուց հետո և երաշխավորում ենք 100% համագործակցություն նման խնդիրների լուծման գործում։
Հրապարակման ժամանակը. Ապրիլ-01-2024